最先端ロボット研究から逆説的に考える「人間の股関節」の凄さ
人間のような“やわらかい”動きのロボットを作るべく日夜研究を重ねる新山龍馬さん。その試作機で存在感を放つ股関節。そこには一体どのような役割が? 研究室を訪ねた。
取材・文/黒田創 撮影/小川朋央
初出『Tarzan』No.814・2021年7月8日発売


人間らしく動くロボットに、股関節は欠かせない。
ロボットと聞くと、ガンダムや『スター・ウォーズ』のC-3POなど、硬い金属製のものをイメージする人が多いはず。だけど、もっと動物や人間のようにすばやい動きで、柔軟性があり、かつ見た目にも硬質な感じのない“やわらかい”ロボットを作れないか?
そんな斬新な発想でロボット研究を行うのが東京大学大学院講師の新山龍馬さんだ。
「子供の頃から生き物の動きに近いキビキビしたロボットを作りたいと考えていて、大学院の頃に犬や猫が跳びはねるようなロボットの製作に取りかかりました」
従来型のロボットの多くは硬い部位同士を繫ぎ、動かし方を工夫することで人間や動物のように見せる設計思想で作られており、それがロボットにありがちな、ぎこちなさに繫がっている。
だが新山さんが目指すのは、人工的に筋肉や骨、関節に近い部品を作り、それらを使い機能的に動けるカラダだ。跳躍と着地ができるロボット開発を最初の目標とした新山さんは、従来のように電気モーターを動力にするのではなく、ゴムチューブ製の人工筋肉を作り、それを空気圧で制御する方法を思いつく。
そうして完成した筋骨格を持つカエル型のロボットは、ダイナミックにピョーンと跳躍した。
次なる目標は人間の形をしたロボットである。
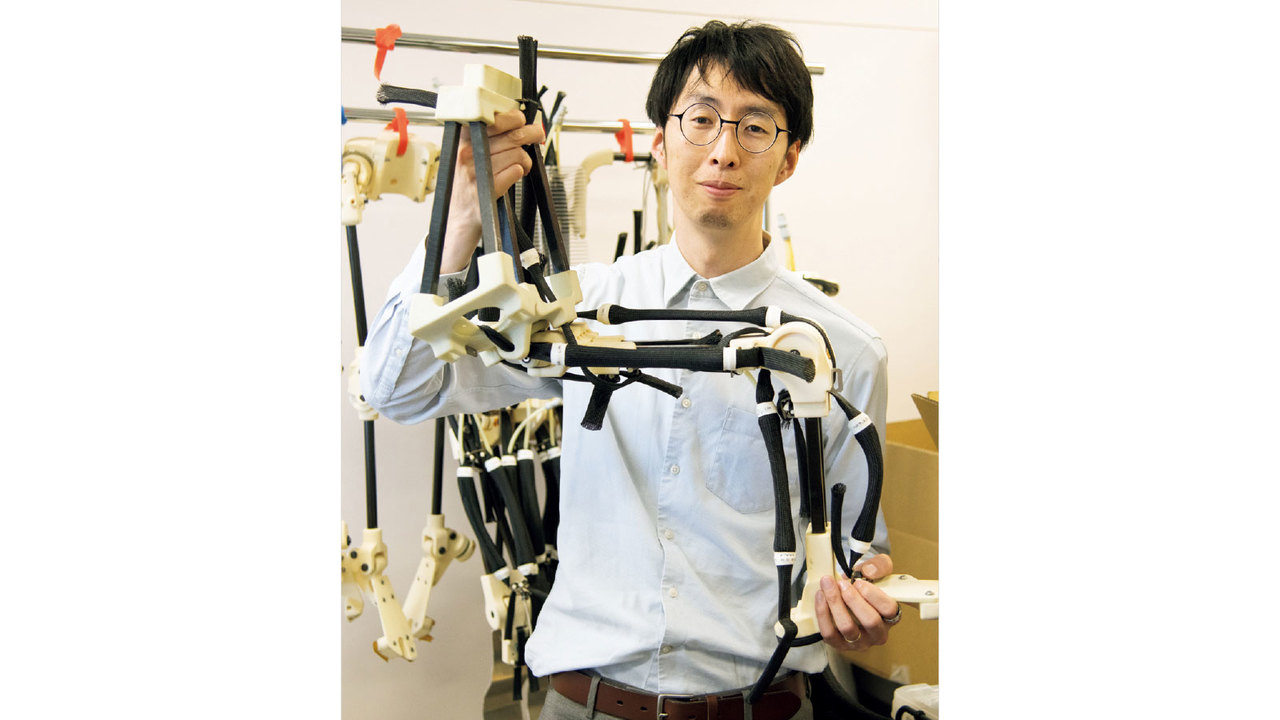
「まずは下半身の動きを作ろうと考えました。二足歩行でカラダも大きな人間の場合、より多くの筋肉を配置する必要がある。そこで、大腿四頭筋やハムストリングス、腓腹筋などを再現しました。下半身のパワーの源となる臀筋については太く長い人工筋肉を使ったので、背中の部分まで筋肉が延びています」
それらの筋肉を集約させ、かつ脚と骨盤の結節点として、カエル型のロボットでは作らなかった股関節も再現することになった。
「二足歩行で立ったり歩いたりする際に、左右のバランスを崩さないために股関節は必要不可欠です。さらに、下半身を安定させ、力強く動かすには、股関節から膝下まで延びる大腿筋膜張筋や、股関節を跨いで延びる腸腰筋の存在が大きいことがわかってきました。
体幹部に大きな筋肉を配置し、そこから腕や脚を動かしていく。人間らしいロボットを作ろうとするとそのような仕組みが理にかなっていることが改めて実感できましたし、それには股関節の設計が鍵になってくるわけです」
股関節の役割は多種多様。再現できないことだらけ。
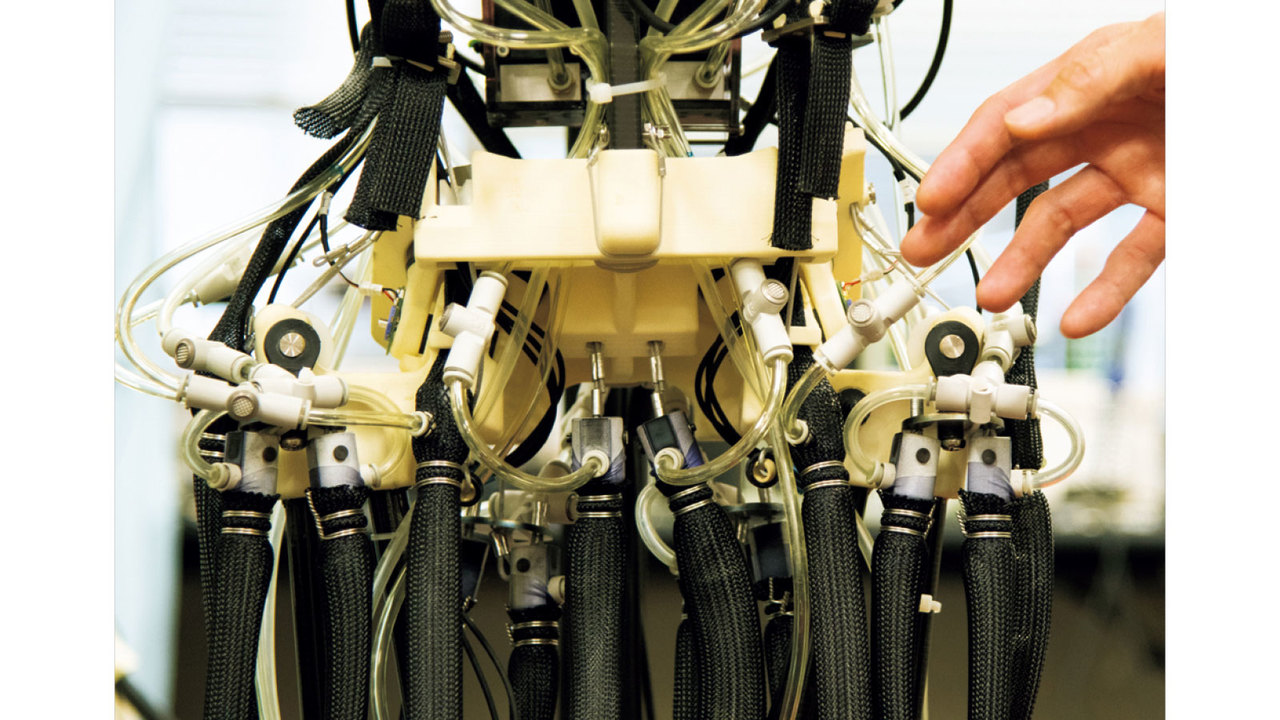
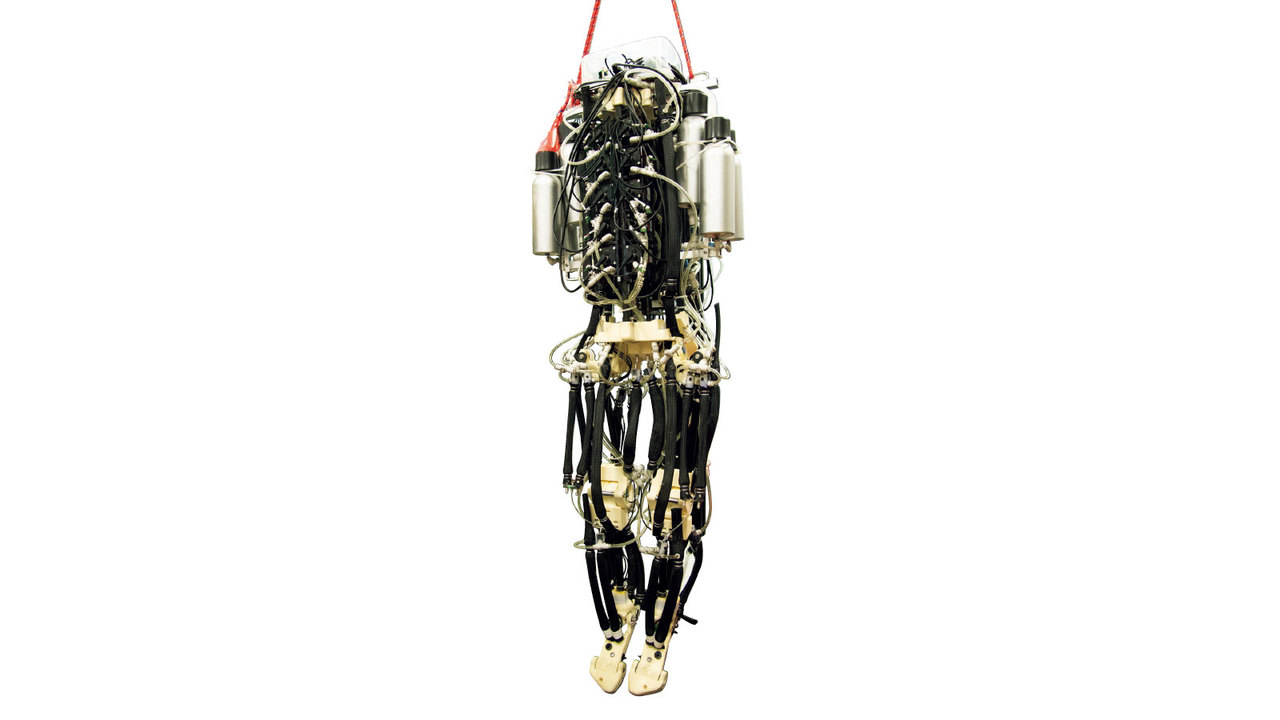
新山さんが作った《アスリート・ロボット》には、脚を外側に広げる大腿筋膜張筋や脚を閉じるのに必要な内転筋も備わっている。それらと前出の筋肉、股関節や膝関節がうまく連動することで、走ることはもちろん膝の曲げ伸ばしや反復横跳び、垂直跳びなどが可能になった。
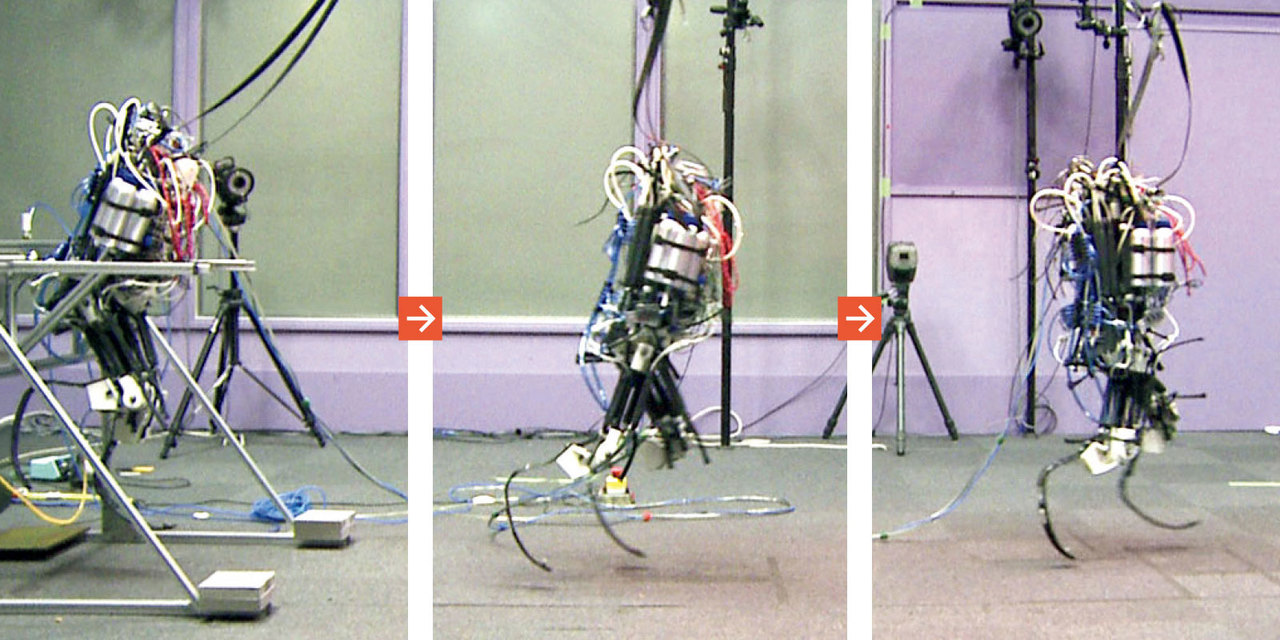
「ただし、人間の股関節のように接合部位を球状にするのは今はまだ難しく、軟骨の役割を果たす部品もない。小臀筋など本来あるべき細かい筋肉も備わっていないため、人間の脚のような内旋・外旋の動きはまだ再現できていません。
その点、膝関節の開発の方がシンプルでした。股関節の役割は多岐にわたる分、想像以上に設計が難しいなと…。研究者としてはその方が好奇心を搔き立てられるのですが(笑)」
ただし、苦心する中での収穫もたくさんあった。ある時、高い場所からの着地に失敗して大腿骨にあたる骨格や膝関節の部品を損傷してしまったが、股関節は無事だったという。
「股関節は強い衝撃を受けても力が左右に分散しますし、左右前後に動く分、破損しづらいのだなと」
私たちは複雑な機能を、当たり前に使いこなしている。
そう話す新山さんが次に目指すのは、別に研究を進めている上半身型アームロボットとの連携だ。
「こちらはバドミントンのラケットのスイングなど、高速な動作が可能です。とはいえ下半身ロボットとくっつけるとなると重さの問題がありますし、重心を支える骨盤や股関節まわりの構造を変えないといけない。
具体的には、可動域が広く、かつ高強度の股関節や背骨の開発も必要でしょう。そう簡単にはいきませんが、将来的には人間や動物と見分けのつかないロボットを作りたい。それが私の夢です」
新山さんはそのために、さらに細かい部分にもこだわり、皮膚や筋肉などに使う素材の研究も進めている。今後、より人間らしい素材が開発される日が訪れたら、現段階では組み込まれていない小さな筋肉や関節包、筋膜といったパーツが備わり、全身のやわらかい動き、そしてやわらかい皮膚を備えた人間型ロボットが本当に実現するかもしれない。
新山さんは最後にこう締め括る。
「研究にあたって解剖学やスポーツバイオメカニクスを学び、実際に人間らしいロボットを作る中で改めて実感したのが、股関節はカラダで最も重要な部位のひとつで、かつ最も再現するのが難しい部位だということ。そして、それだけの身体構造が備わっていて、当たり前に機能的に使いこなす人間の凄さです(笑)」 